Raging Rotors SPECIAL: A Build More Fun than the Lego Movie, Part 2: SimonK Says…
 Part 1 of the Mega Multirotor build can be found Right Here.
Part 1 of the Mega Multirotor build can be found Right Here.
The frames are built, and now it is time to get the right motors and speed controllers for each of our three multirotor setups. Don’t be afraid, with every kit/frame there is available for purchase there are always suggested motor and speed controller combos that go well with that particular frame. Even easier, theses combos can be purchased with the frame company to take out the legwork in finding the perfect match, but normally that adds a leg (or at least an arm) to the price.
I did all my shopping a la carte, so ideally this should cut down on costs, which we will sum up at the end of each part of the series. Let’s start with motors and finish with ESCs.
Motors:
As I stated, motors are usually suggested by the manufacturer of the frame. Now these are only suggestions; you can install any size motor you want, but going smaller risks labored performance of the multirotor aircraft, and bigger motors may have large power or ESC requirements.
Lynxmotion 400: In this case a 2830 (28mm stator diameter, 30mm length respectively), was suggested so I was able to acquire 4 11-turn, 1000kv motors from Turnigy (via eBay), with a maximum draw of 22amps (more on why that matters in a minute). All four motors shipped cost $84.
Armattan 258 V-Tail: This quadcopter was by far the smallest of the 3 frames, so this frame required the small 2208 motor (22mm diameter, 8mm length). I picked up Suppo 2208 14-turn, 1450 kv motors from RCPlaneBuilder. These motors have a maximum draw of 14amps, and cost $62 after shipping
DJI Flamewheel 450: This frame was a little more open for interpretation for required motors, so I picked a midrange size: 2212 (22mm diameter, 12mm length). I also relied on RCPlaneBuilder and acquired more Suppo motors, this time 2212 10-turn, 1400kv. These have a maximum draw of 14.5 amps, and only cost a little more than the 2208 with $66 after shipping.
Speed Controllers (ESCs):
The ESC is the barrier between battery and motor, giving us the power to control all that is the multirotor. Most important is that there must be a fast response between Transmitter and/or Multicontrol board (gyro). With that in mind, we need a more responsive ESC, which is found in flashed ESCs. Like updating a program or hardware on the computer, an ESC is flashed to update to a faster data transfer rate as well as modify various settings. The most common firmware programming set is called SimonK. This is the common programming in all the ESCs I acquired.
When it comes to choosing the amperage of your ESC, we refer back to our motors. The standard rule I’ve come to live by is round the maximum amperage of the motor to the nearest 10, and that’s a good ESC for your purposes without frying/overheating anything. So if the max amperage of a motor is 14amps, then a 20amp or higher ESC is sufficient.
Lynxmotion 400: With the maximum draw of 22amps for the Turnigy motors, I needed 30amp ESC which I found from BuddyRC. The DYS SimonK Multirotor 30A ESC was a perfect fit and reached me for about $66 shipped.
Armattan 258 V-Tail: The current draw of the 2208 motors only requires a 20amp ESC, but I decided to get adventurous (READ: shipping error). I picked up Afro 30A ESCs from -Redacted- for $62.
DJI Flamewheel 450: 14.5amps would required 20amp ESCs like the Armattan, and this time I did pick up the right ESCs. For this quad I also purchased Afro 20A ESCs from -Redacted- for $56.
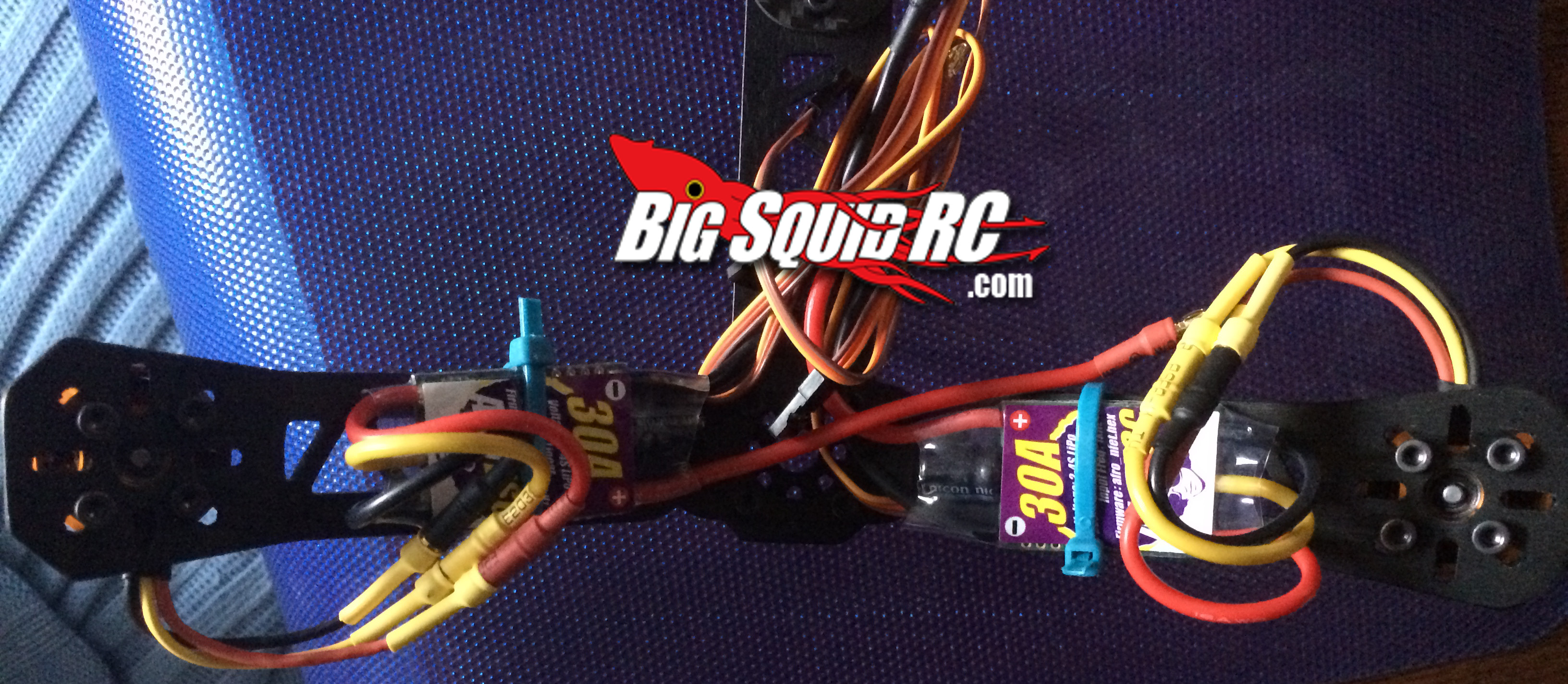
At this point, it’s all just assembly for these electronics (soldering may or may not be required depending on the motor/ESC). Don’t forget your power distribution for each quad. The DJI Flamewheel has an integrated distribution board, so all I needed was a whip with a battery plug (Eflite EC3 Device Whip, $4). For the Lynxmotion 400 I soldered up a power distribution wire set with 3.5mm and a battery plug I had laying around (about $7). The Armattan was a perfect setup for a Turnigy Power Distribution Board w/ XT-60 plug I bought for $5. Below you will find pictures of the motors, ESCs, and some snippets of their install for some of the quadcopters.








Running Totals:
|
And with that, we are one major component away from having the electronics complete, which leads us to the title of the next installment: ‘If I Only Had a Brain‘
Until then, Stay Shiny and Keep Flyin’!
